
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de concevoir et réaliser le shield Arduino pour la partie de commande d'une voiture intelligente. Tout d'abord, j'ai dimensionné chaque composant de chaque fonction de la voiture afin de garantir un fonctionnement entièrement analogique. Ensuite, j'ai disposé ces composants sur une PCB dans le logiciel Proteus, puis l'IUT a passé commande de la carte imprimée auprès d'un fournisseur. Après réception de la carte, j'ai procédé à la soudure des composants préalablement dimensionnés et testé chaque fonction du système individuellement. Dans une seconde étape, j'ai programmé l'Arduino sur lequel le shield était installé en utilisant le langage C++, permettant ainsi d'ajouter des fonctionnalités telles que la possibilité de contrôler la voiture avec un téléphone via une connexion Bluetooth.

Mathéo
Mendoza
Hernandez
Etudiant en école d'ingénieur et alternant chez Occion

A PROPOS DE MOI
Etudiant en première année d’école d’ingénieur à l'ENSEEIHT de Toulouse, je suis actuellement engagé dans une alternance chez Occion.Sur mon temps libre, je joue de la guitare.Après 8 ans de conservatoirs durant lesquels j'ai fait partie d'un groupe de musique, je joue et j'apprend désormais en autodidacte.
PARCOURS SCOLAIRE
2023 - Maintenant
ENSEEIHT - TOULOUSE
Formation ingénieur 3EA
2021 - 2023
IUT Paul Sabatier - TOULOUSE
BUT GEII
2018 - 2021
Lycée Louise Michel - NARBONNE
BAC SSI avec mention
Compétences
Compétences Techniques

C++
Python

TIA Portal
Proteus

PcVue

Filter Pro
MatLab

Coppelia Sim

HTML

CSS

Microsoft Office

Photoshop
COMPÉTANCES TRANSVERSES
Les projets réalisés durant mon cursus scolaire, mes expérience professionnelles ainsi que mon appartenance à un groupe de musique m'ont permis de développer ma capacité à travailler en groupe et ma gestion du temps.
Mon expérience aux Etats-Unis m'a également permis d'avoir un bon niveau d'anglais, j'arrive à comprendre, à m'exprimer et j'ai également du vocabulaire technique
Compétences
Expériences
-
Stage de 3ème
Octobre 2017 -
Ouvrier de Chai
été 2021 -
Employé Polyvalent
été 2022 -
Stagiaire Technicien Electronique
avril 2023 - juin 2023 -
Technicien Electronique
juin 2023 - août 2023 -
Alternant
Ingénieur
En cours
-

En 3ème, j'ai effectué un stage d'observation au sein d'une entreprise appelée CDA. Bien que cela puisse sembler insignifiant puisque je me contentais d'observer, j'ai maintenu le contact avec eux. Cela s'est avéré bénéfique, car cette connexion m'a offert l'opportunité de travailler ultérieurement dans la branche américaine de cette même entreprise.
-

J'ai travaillé au sein de l'exploitation vinicole familiale, où mes responsabilités comprenaient la mise en bouteille, la préparation des commandes ainsi que l'organisation de dégustations, parfois en compagnie de clients étrangers avec lesquels je communiquais en anglais.
-

J'ai occupé un poste polyvalent chez Lidl à l'Union (31240). Mes principales responsabilités étaient l'encaissement des produits, la mise en rayon, le maintien de la propreté et de l'agrément du supermarché pour les clients, ainsi que l'assistance et le conseil aux clients en cas de besoin.
-
A la fin de mon DUT, j'ai eu l'opportunité de réaliser un stage en tant que technicien en électronique au sein de l'entreprise CDA USA à Richmond, en Virginie, aux États-Unis. Mon rôle au cours de cette période a consisté à assembler, câbler, programmer et tester des machines d'étiquetage et de remplissage automatique.
-
Suite à mon stage chez CDA USA, j'ai été embauché grâce à mon efficacité, ce qui m'a permis de travailler en tant que technicien en électronique tout au long de l'été 2023. Mon rôle a consisté à assembler, câbler, programmer et tester des machines d'étiquetage et de remplissage automatique.
-

Je travail actuellement chez Occion en tant qu'alternant ingénieur en électronique. Mon rôle comprend la conception de cartes électroniques pour des projets de produits en série ainsi que la prise en main du logiciel de CAO Fusion 360.
Projets réalisés
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de développer un programme permettant de contrôler un bras robotique comportant 5 axes. Pour cela, j'ai eu l'obligation d'utiliser un composant spécifique, le PCA9685, qui permet de contrôler les 5 servomoteurs du bras robot. Ce composant génère 16 signaux PWM distincts et utilise une communication I2C. J'ai commencé par étudier la documentation technique (datasheet) du composant afin de comprendre son fonctionnement et la manière de communiquer avec lui. Ensuite, j'ai écrit des fonctions en langage C++ qui permettent d'initialiser le composant avec une fréquence de PWM définie (dans mon cas, 50 Hz pour les servomoteurs) et de définir les positions souhaitées pour chacun des servomoteurs connectés. Une fois ces fonctionnalités implémentées, j'ai développé deux programmes distincts. Le premier permet de contrôler le bras robotique à l'aide d'une application mobile, tandis que le second programme lui permet d'exécuter une trajectoire préprogrammée.
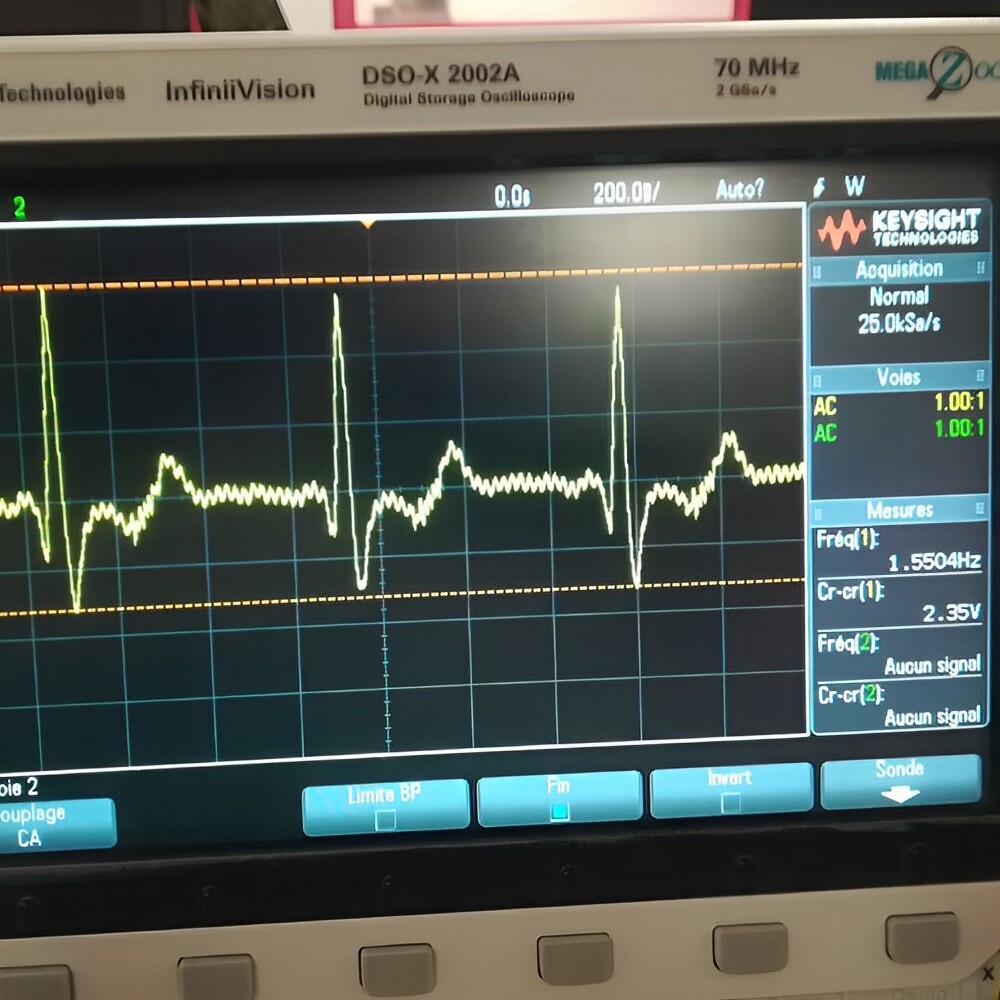
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de concevoir et réaliser un électrocardiogramme. Nous formions un groupe de 4 personnes pour ce projet, et nous avons réparti les tâches de manière à ce que chacun d'entre nous dimensionne une partie du projet. Personnellement, j'ai été responsable de la dimensionnement, de la soudure et des tests de la partie alimentation de la carte, qui fournit à la fois une tension de 5V et une tension de 2,5V pour certains composants. J'ai également pris en charge la partie amplificateur différentiel, qui reçoit en entrée les signaux provenant des électrodes connectées au patient et fournit en sortie un signal qui résulte de la différence entre ces signaux d'entrée. Enfin, j'ai également été responsable de la partie réjecteur de bande de 50Hz, afin de minimiser les perturbations provenant du réseau électrique.
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de programmer la maquette d'une chaîne de tri industrielle. Nous formions un groupe de 8 personnes pour ce projet, et chacun d'entre nous était responsable d'une partie de la maquette. Afin de suivre les progrès, nous utilisions l'outil de gestion de projet en ligne Trello. Les automates utilisés étaient de la marque SIEMENS, nous avons donc utilisé TIA Portal pour les programmer. Pendant cette SAE, j'étais en charge de la partie qui triait les pièces en fonction de leur couleur. Pour cela, j'ai d'abord créé la machine à états du système de base, que j'ai ensuite enrichie avec de nouvelles fonctionnalités au fil du projet, puis j'ai programmé le tout en langage ST dans TIA Portal. Une fois le système opérationnel, j'ai développé une interface utilisateur (IHM) permettant à l'utilisateur de gérer le système.
Pendant mon emploi chez CDA USA, j'ai pris en charge l'assemblage, le câblage, le raccordement, la programmation et les tests d'une ligne complète de remplissage, vissage et étiquetage de pots de produits de beauté pour l'entreprise Sunny In Denbigh. Sur le plan technique, j'ai raccorder les capteurs et actionneurs à automates en respectant un programme dont les entrées et sorties étaient prédéfini, intégré l'écran au réseau Modbus et câblé les dispositifs de sécurité tels que les arrêts d'urgence, disjoncteurs et sectionneurs. Cette approche globale garantissait le bon fonctionnement et la sécurité de la ligne de production.
Projets en cours...
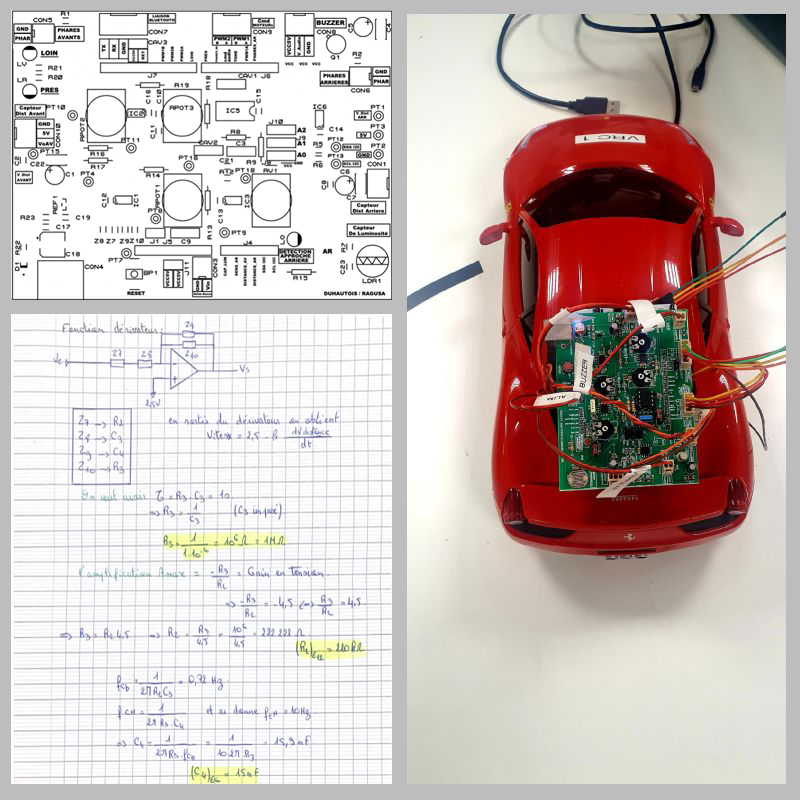
SmartCar
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de concevoir et réaliser le shield Arduino pour la partie de commande d'une voiture intelligente. Tout d'abord, j'ai dimensionné chaque composant de chaque fonction de la voiture afin de garantir un fonctionnement entièrement analogique. Ensuite, j'ai disposé ces composants sur une PCB dans le logiciel Proteus, puis l'IUT a passé commande de la carte imprimée auprès d'un fournisseur. Après réception de la carte, j'ai procédé à la soudure des composants préalablement dimensionnés et testé chaque fonction du système individuellement. Dans une seconde étape, j'ai programmé l'Arduino sur lequel le shield était installé en utilisant le langage C++, permettant ainsi d'ajouter des fonctionnalités telles que la possibilité de contrôler la voiture avec un téléphone via une connexion Bluetooth.
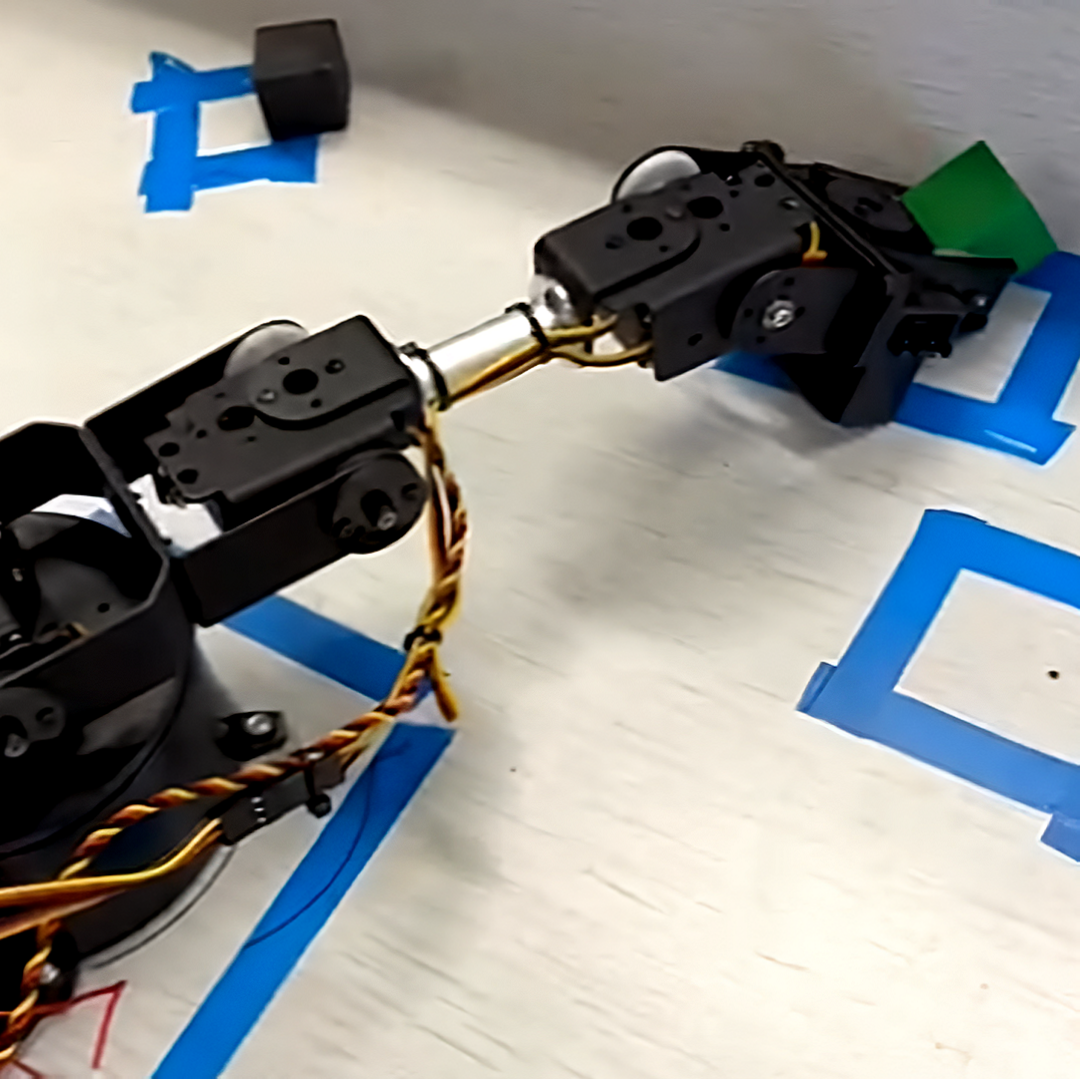
Bras Robot
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de développer un programme permettant de contrôler un bras robotique comportant 5 axes. Pour cela, j'ai eu l'obligation d'utiliser un composant spécifique, le PCA9685, qui permet de contrôler les 5 servomoteurs du bras robot. Ce composant génère 16 signaux PWM distincts et utilise une communication I2C. J'ai commencé par étudier la documentation technique (datasheet) du composant afin de comprendre son fonctionnement et la manière de communiquer avec lui. Ensuite, j'ai écrit des fonctions en langage C++ qui permettent d'initialiser le composant avec une fréquence de PWM définie (dans mon cas, 50 Hz pour les servomoteurs) et de définir les positions souhaitées pour chacun des servomoteurs connectés. Une fois ces fonctionnalités implémentées, j'ai développé deux programmes distincts. Le premier permet de contrôler le bras robotique à l'aide d'une application mobile, tandis que le second programme lui permet d'exécuter une trajectoire préprogrammée.
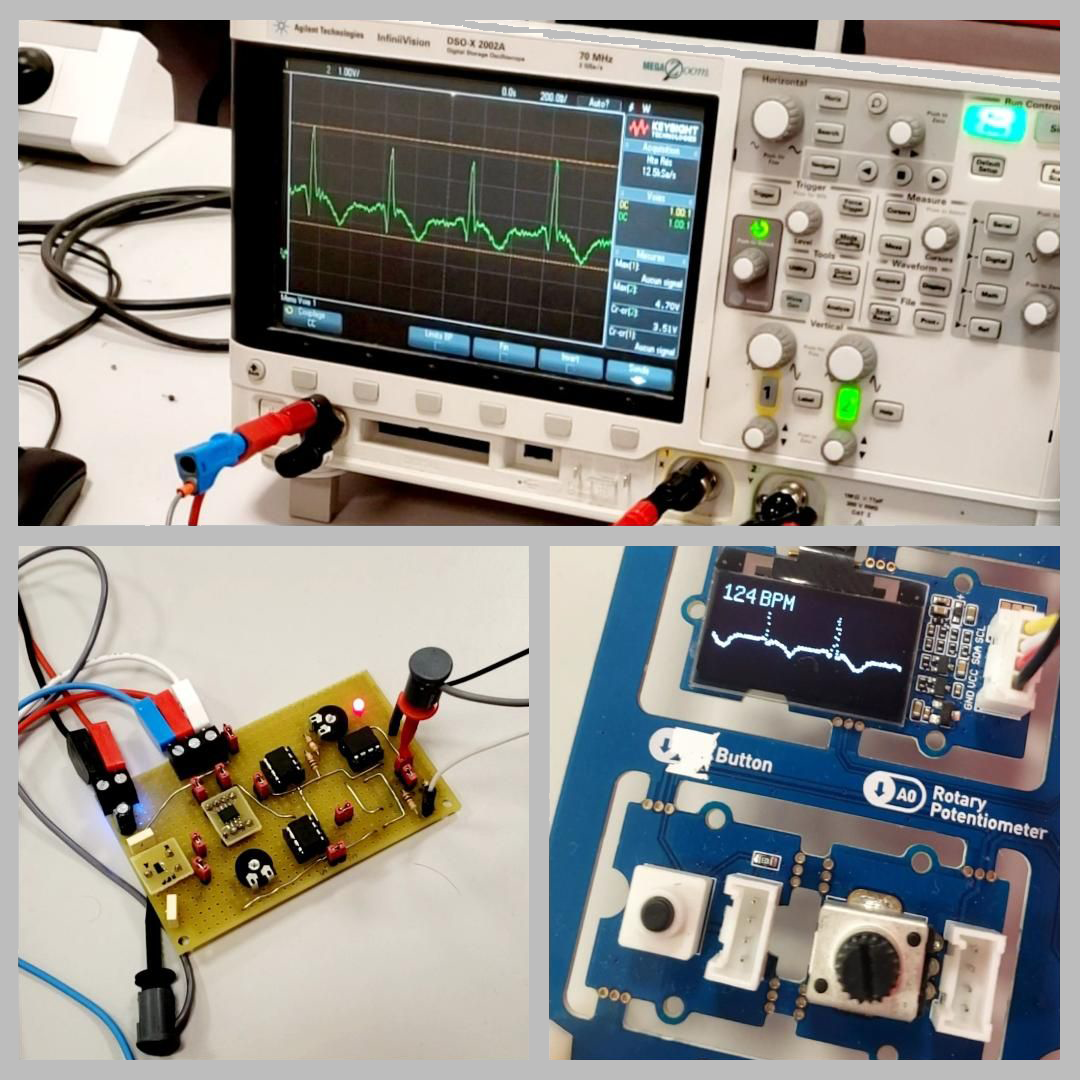
Electrocardiogramme
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de concevoir et réaliser un électrocardiogramme. Nous formions un groupe de 4 personnes pour ce projet, et nous avons réparti les tâches de manière à ce que chacun d'entre nous dimensionne une partie du projet. Personnellement, j'ai été responsable de la dimensionnement, de la soudure et des tests de la partie alimentation de la carte, qui fournit à la fois une tension de 5V et une tension de 2,5V pour certains composants. J'ai également pris en charge la partie amplificateur différentiel, qui reçoit en entrée les signaux provenant des électrodes connectées au patient et fournit en sortie un signal qui résulte de la différence entre ces signaux d'entrée. Enfin, j'ai également été responsable de la partie réjecteur de bande de 50Hz, afin de minimiser les perturbations provenant du réseau électrique.

Station de tri
Dans le cadre d'un projet de Situation d'Apprentissage Évaluée (SAE), j'ai été chargé de programmer la maquette d'une chaîne de tri industrielle. Nous formions un groupe de 8 personnes pour ce projet, et chacun d'entre nous était responsable d'une partie de la maquette. Afin de suivre les progrès, nous utilisions l'outil de gestion de projet en ligne Trello. Les automates utilisés étaient de la marque SIEMENS, nous avons donc utilisé TIA Portal pour les programmer. Pendant cette SAE, j'étais en charge de la partie qui triait les pièces en fonction de leur couleur. Pour cela, j'ai d'abord créé la machine à états du système de base, que j'ai ensuite enrichie avec de nouvelles fonctionnalités au fil du projet, puis j'ai programmé le tout en langage ST dans TIA Portal. Une fois le système opérationnel, j'ai développé une interface utilisateur (IHM) permettant à l'utilisateur de gérer le système.

Mise en place d'une ligne complète de production automatisé
Pendant mon emploi chez CDA USA, j'ai pris en charge l'assemblage, le câblage, le raccordement, la programmation et les tests d'une ligne complète de remplissage, vissage et étiquetage de pots de produits de beauté pour l'entreprise Sunny In Denbigh. Sur le plan technique, j'ai raccorder les capteurs et actionneurs à automates en respectant un programme dont les entrées et sorties étaient prédéfini, intégré l'écran au réseau Modbus et câblé les dispositifs de sécurité tels que les arrêts d'urgence, disjoncteurs et sectionneurs. Cette approche globale garantissait le bon fonctionnement et la sécurité de la ligne de production.
Arrive bientôt
Projets en cours...